

TAG:足式机器人
宇树科技足式机器人腿部结构专利解读
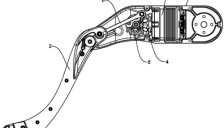
本文详细解读了宇树科技最新获得授权的足式机器人腿部结构专利。该专利的核心创新在于将小腿动力单元内置到大腿杆件内部,从而优化了腿部结构的横向尺寸和外形轮廓,提升了整机的紧凑性和系统集成度。文章分析了该设计与传统结构的对比、工程层面的实际意义,以及它与宇树科技技术路线的契合性,突出了其在足式机器人产品化进程中的价值。

宇树科技足式机器人专利获授权
宇树科技近日获得“一种机器人腿部结构和足式机器人”专利授权。该专利通过将小腿动力单元置于大腿杆件内部,优化了腿部结构设计,相比传统并列式布局,显著减少了占用空间,使足式机器人机身更窄、整体尺寸更紧凑,提升了机器人的结构效率和实用性。

获数千万元融资加持,「镜识科技」以“全球首款双形态家庭机器人BAOBAO”,颠覆四足机器人市场!
镜识科技完成数千万元A轮融资,推出全球首款双形态家庭机器人BAOBAO,可在类人形态与四足形态间自如切换。公司由浙大教授领衔,专注于AI赋能高机动足式机器人研发,已构建消费级、工业级和科研教育三大产品线,包括打破速度纪录的黑豹II四足机器人和工业级Apollo机器人,展现了在足式机器人领域的技术实力和商业化前景。


重磅!浙大最新综述,解码40+年足式机器人技术演进与未来挑战
浙江大学研究团队在国际期刊发表重磅综述论文,系统梳理了单腿机器人40多年来的技术演进,涵盖结构设计、建模方法和控制策略等核心领域。该研究由院士团队领衔,揭示了单腿机器人作为多腿系统基本单元的科学意义,为理解仿生运动难题和商业化四足机器人发展提供了重要理论支撑。


AI算力新贵Nscale完成20亿美元C轮融资 估值达146亿美元
2026-03-10
0 浏览
港股AI应用股普涨 OpenClaw本地化部署门槛大降
2026-03-10
0 浏览
芯片股盘中暴涨 利好政策突至
2026-03-10
0 浏览
首批人形机器人进驻酒店
2026-03-10
0 浏览
Arduino VENTUNO Q发布 40 TOPS算力突破边缘AI极限
2026-03-10
0 浏览
SkillHub社区上线 专为中国用户优化 含1.3万AI技能
2026-03-10
0 浏览
龙虾经济火爆 饲料商率先受益 Token消耗量激增
2026-03-10
0 浏览
深圳龙岗携手Kimi办千人龙虾盛宴 助力OpenClaw落地
2026-03-10
0 浏览
揭秘上帝算法 具身研习社探索奥秘
2026-03-10
0 浏览
微软CEO纳德拉:AI不可怕 拒绝学习才危险
2026-03-10
0 浏览


