

TAG:自主规划
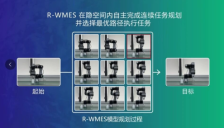
中国首个基于世界模型的机器人任务执行系统在蓉发布
成都人形机器人创新中心成功研发国内首个基于世界模型的机器人任务执行系统(R-WMES),该系统通过学习现实世界物理规律,使机器人具备类似人类的物理直觉和自主规划能力。只需输入目标图片,机器人就能自动判断状态、规划并执行任务,在陌生环境中展现出强大的自适应性和任务完成度,解决了人形机器人不够聪明的问题,是推动机器人实用化、商业化的重要突破。




中国电信董事长柯瑞文:Token经营的本质是为用户提供AI服务
2026-04-30
0 浏览
“AI+制造”再提速:DeepSeek-V4上线东莞市人工智能大模型中心
2026-04-30
0 浏览
全球27国526支战队参与巅峰竞技,AGIBOT WORLD CHALLENGE @ ICRA 2026线上赛成绩揭晓
2026-04-30
0 浏览
帕西尼1个月发布3款触觉传感器,再度展现全球具身感知龙头姿态
2026-04-30
0 浏览
软银拟推出AI新实体并计划年内上市,估值或达千亿美元
2026-04-30
0 浏览
中国机器人产业的梦想,是成为“打工仔”替代者
2026-04-30
0 浏览
车展季·大咖说丨芯擎科技CEO汪凯:座舱芯片比智驾芯片更复杂,舱驾融合价值在中低端市场更突出
2026-04-30
0 浏览
Rabobank:欧盟AI雄心面临瓶颈,电网成最大约束
2026-04-30
0 浏览
共享基经|同主题ETF对比(十):名称同样包含“科创芯片”,这两个指数有何不同?
2026-04-30
0 浏览
钉钉发布 AI 录音硬件 DingTalk A1 Pro,售价1299元,支持手机反向充电
2026-04-30
0 浏览


