TAG:柔性机器人
全球首个肌肉驱动机器人成功实现Sim-to-Real迁移并完成真实环境验证
文章深入探讨了全球首个肌肉驱动机器人成功实现Sim-to-Real迁移的里程碑式成果。针对气动肌肉与肌腱传动中极端复杂的非线性动力学难题,研究团队提出广义执行器网络(GeAN),抛弃传统扭矩传感器,仅凭位置轨迹即可精准建模。该技术在四自由度机械臂上完成了高难度动态任务的零样本部署,填补了柔性机器人从仿真到现实的核心技术空白,为未来安全高效的人机共融机器人发展奠定了坚实基础。


T-RO研究:机器人传感器阵列减半精度反升
曼彻斯特大学与港中文团队在T-RO发表新研究,提出柔性机器人传感器布局的端到端协同优化方法。通过联合优化传感器位置、数量与形变预测网络,实现‘减半传感器数量但精度更高’的反直觉效果。研究将制造约束融入优化过程,真正解决从仿真到落地的工程难题,为软体机器人与可穿戴设备设计提供新范式。

柔性革命掀起机器人风暴 席卷半导体与3C产业
本文探讨了具身智能技术如何引领制造业的“柔性革命”,特别是在半导体和3C行业。文章详细分析了具身智能通过“感知-决策-执行”闭环,提升机器人灵巧操作与环境适配能力,有效解决传统工业机器人在精密制造中编程依赖、精度不足等痛点。内容涵盖技术演进、多行业落地案例(如半导体超精密装配和3C多品种生产),以及国产化突破与产业生态构建,展现了柔性机器人如何成为制造业升级的核心动力。
进化算法赋能:纳米定位机器人突破性能瓶颈,兼具超高刚度比与机械带宽
新加坡南洋理工大学研究团队在Nature子刊《Communications Engineering》发表创新成果,提出基于进化理念的纳米定位机器人设计方法。该方法通过傅里叶函数表征结构拓扑,结合运动学分析与智能进化算法,成功开发出XYθz纳米定位机器人,实现刚度比741-869、机械带宽123Hz、定位精度13nm的突破性性能,远超现有技术水平。


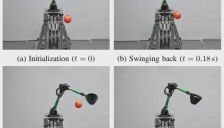
让藤蔓机器人乖乖“听话”!MIT林肯实验室×圣母大学破解操纵难题!
MIT林肯实验室与圣母大学合作研究藤蔓机器人的操纵性问题,通过系统实验分析了顶端负载、腔压、长度、直径等关键参数对机器人曲率控制的影响。该研究填补了藤蔓机器人定量研究的空白,将机器人设计从经验驱动推向数据驱动,显著提升了机器人在搜救、勘探等复杂环境中的可靠性和适应性。

解锁柔性机器人精准导向能力!加州大学《Sci. Adv.》:LCE材料驱动毫米级软体机器人实现突破性外翻运动
加州大学研究团队在《Science Advances》发表突破性研究,利用液晶弹性体(LCE)材料开发出毫米级可转向柔性外翻机器人。该机器人通过LCE执行器和柔性加热器集成在TPU薄膜中,实现精准的温度响应弯曲控制,能够在血管等狭窄空间中灵活导航。相比传统机器人,这种设计显著降低了对环境的作用力,在医疗介入和工业检测领域具有重要应用价值。
港城大等团队突破连续体机器人控制难题,让柔性臂实现毫米级精准定位!
香港城市大学与合肥工业大学研究团队创新性地将卡尔曼滤波器应用于连续体机器人控制,通过混合模型驱动与数据驱动方法,成功解决了柔性机器人精准控制难题。该技术使连续体机器人在保持高度灵活性的同时,实现了末端毫米级精确定位,为微创手术和精密操作等应用场景提供了重要技术突破。