

TAG:机器人控制

腾讯发布HY-Embodied-0.5具身模型:22项评测中16项最佳刷新行业纪录
腾讯Robotics X与混元团队发布具身基础模型HY-Embodied-0.5,面向机器人三维感知与物理交互痛点重构架构与训练范式,推出MoT-2B与MoE-32B两款模型。依托超1亿条具身数据及多阶段后训练,22项评测16项夺冠,并在实机打包、堆叠等任务中优于主流基线,推动大模型落地物理世界。

李飞飞发布CaP-X框架 真实机械臂零样本完成复杂任务
本文介绍李飞飞团队联合多机构推出的CaP-X机器人控制框架,无需训练和专属任务数据集,仅靠大模型生成可执行代码即可驱动机械臂完成复杂操作,性能接近甚至超越现有VLA模型,同时配套CaP-Bench评测基准与CaP-Agent0免训练框架,为通用实体机器人落地提供轻量化稳健路径。

RL Token攻克VLA精度难题 在线强化学习助机器人精准操控
RL Token提出一种创新的在线强化学习框架,通过轻量级接口让预训练VLA模型在真实机器人上实现高精度操作的快速优化。该方法在保持泛化能力的同时,解决了传统方法在‘最后一厘米’精度任务中的效率与稳定性难题,为机器人灵巧操控提供了高效、可落地的技术路径。

一汽研发人形机器人专利 提升抗扰能力
一汽公司近日公布了一项人形机器人训练系统专利,该系统通过采集关节角度、惯性测量参数和足部接触力等数据,结合上下肢命令生成模块,提升机器人对内部扰动的适应能力。这项技术有望推动人形机器人在复杂环境中的稳定性和灵活性。

全球首例太空AI与地面机器人闭环测试成功 国星宇航实现跨域算力控制
国星宇航与上海交通大学联合实验室成功完成全球首个'太空AI+地面机器人'闭环试验,通过自然语言指令调用太空算力操控地面机器人,实现从数据处理到跨域智能控制的关键升级。该技术突破通信与地理限制,构建太空数据安全体系,为未来智能体应用提供系统性保障。
OpenClaw研发团队谈具身智能的非技术传承
本文探讨了OpenClaw在具身智能领域的非技术遗产,分析了其作为AI代理框架的快速走红与争议。文章通过研发人员的视角,揭示了OpenClaw如何改变机器人控制方式和管理流程,同时指出其技术局限和安全风险。核心观点是OpenClaw更多是提升项目管理效率的工具,而非真正的技术突破。
UNC团队攻克VLA模型痛点 新方案提升任务成功率17%
北卡罗来纳大学教堂山分校团队揭示VLA模型在真实场景中因视觉主导语言而产生的指令偏离问题,提出无需修改架构的CAG优化方案,通过双分支对比引导语言决策,使任务成功率平均提升17.2%,反事实失效显著减少,为具身智能落地提供关键突破。

国地中心联合北理工发布“龙驭”小脑模型 实现零样本全身动态动作追踪
国地中心与北京理工大学联合发布人形机器人“龙驭”小脑模型,该模型能够实现零样本全身动态动作追踪,仅需少量数据训练即可泛化至实时动捕、视频衍生动作等场景,支持行走、奔跑、跳跃等高动态运动,并具备抗扰动和摔倒恢复能力,为远程操控、机器人数据集构建及自主行动奠定技术基础。

智元机器人发布新专利 提升控制精度
智元机器人近日公布了一项新专利,涉及机器人控制方法及模型训练技术。该专利通过融合场景图像和机器人控制指令的特征向量,并进行查询处理和动作预测,旨在提升机器人控制的精度。这一创新技术有望在人工智能和机器人领域带来更高效、更精准的控制解决方案。
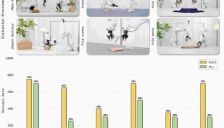
机器人上演浪漫求婚秀
清华大学等研究团队开发出HuMI系统,通过便携式穿戴设备和分层控制策略,实现了人形机器人高效学习全身协调操作。该系统让机器人能够完成单膝下跪求婚、拔剑等高难度动作,并在多种场景中展现出色的泛化能力,为人形机器人技能学习提供了创新解决方案。
众擎机器人发布人形机器人视觉起身控制专利
众擎机器人近日公布了一项人形机器人视觉起身控制专利,该技术通过感知周围环境信息,动态调整机器人的质心和末端执行器轨迹,显著提升了人形机器人在复杂真实场景下执行起身动作的稳定性和成功率。

Helix 02:移动与操作融合,实现人形机器人全身控制的VLA模型
本文介绍了Figure公司发布的Helix 02模型,该模型通过三层系统架构(System 0/1/2)实现了人形机器人移动与操作的无缝融合。文章详细阐述了其如何解决传统方案中动作僵化、切换迟缓的问题,通过统一的视觉语言模型(VLA)实现从场景理解到全身关节控制的实时、自主协同,提升了机器人在动态环境中的鲁棒性和自然运动能力。
世界模型走入物理世界,蚂蚁灵波开源LingBot-VA,让机器人“先思后行”
蚂蚁灵波科技开源具身世界模型LingBot-VA,首次提出自回归视频-动作世界建模框架,将大规模视频生成与机器人控制深度融合,使机器人能够“边推演、边行动”。该模型在真机评测中对复杂物理交互展现出强适应能力,仅需少量演示数据即可适配高难度任务,成功率平均提升20%;在仿真评测中刷新行业纪录,为具身智能发展开辟新路径。

PI VLA模型解读系列二:π0.5模型与实时分块算法RTC
本文深入解读PI VLA模型系列的第二部分,重点介绍了从π0.5模型到实时分块算法(RTC)的技术演进。文章详细阐述了π0.5模型如何通过多源异构数据协同训练提升泛化能力,以及知识绝缘VLA(π0.5-KI)新范式如何实现高效训练与精准控制。同时,解析了实时动作分块算法的原理及其对VLA模型的普适性价值。

春晚人形表演或将实现全自主控制
本文探讨2026年春晚人形机器人表演能否实现全自主,分析了当前技术进展与挑战。文章指出,虽然中国机器人公司在自主技术上取得突破,但受限于复杂环境稳定性、实时编排等因素,春晚表演更可能采用“预编程+遥控微调”的混合模式,而非完全自主。同时解释了遥控干预的必要性及其进化形式,展望了未来人形机器人的发展前景。







