

TAG:支点行走
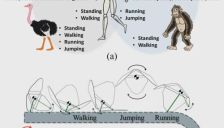
北理工团队研发磁驱微机器人 实现形态功能共融决策
北京理工大学王化平团队受生物支点行走启发,提出磁驱微机器人“形态-功能”共融的自主决策新机制,实现复杂环境中多模态运动切换与精准抓取。该研究发表于《IEEE Transactions on Robotics》,通过分层控制架构和非均质磁化设计,使微机器人在变径隧道、沟壑跨越及多形状目标运输中表现出高适应性与路径精度,推动微机器人向智能化、自主化迈进。

兆易创新2025年净利大增49% 存储芯片毛利攀升
2026-03-31
0 浏览
阿里推出千问全模态大模型Qwen3.5-Omni
2026-03-30
0 浏览
澜起科技2025年营收54.56亿增长近50% AI芯片放量助推业绩
2026-03-30
0 浏览
央视新闻联播聚焦中关村论坛 月泉仿生应手与博文机器人引关注
2026-03-30
0 浏览
灵猴机器人完成B轮融资 加速具身智能量产进程
2026-03-30
0 浏览
五一视界董事长李熠:物理AI第一股将转型物理AI工厂
2026-03-30
0 浏览
具身智能商业化落地面临多重挑战
2026-03-30
0 浏览
院士学者与产业领袖4月聚首北京 共话具身智能与人形机器人万亿赛道
2026-03-30
0 浏览
越疆协作机器人25年出货量全球居首 从龙头到领跑
2026-03-30
0 浏览
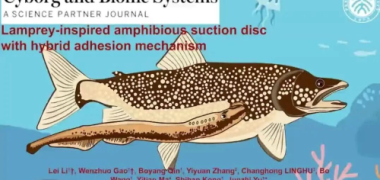
北大喻俊志团队研发七鳃鳗仿生吸盘 登Science合作期刊 吸附力达自重850倍
2026-03-30
0 浏览


