

TAG:抓取操作

浙大团队研发仿生飞行机器人 可抓握栖息灵活运载
浙江大学团队研发出仿生飞行机器人HI-ARM,将人手的灵巧抓取与无人机的敏捷飞行深度融合,实现了空中自主抓取、开门、栖息和运输等功能。这款仅手掌大小的机器人具备5自由度变形能力,能在复杂环境中完成多种任务,展示了空中操作机器人的巨大潜力。





PPG Plus新品亮相九州展 百年科技美学重塑汽车膜标准
2026-03-23
0 浏览
Seedance 2.0全球发布 登顶AI视频排行榜
2026-03-23
0 浏览
千问AI打车功能上线 支持常用地记忆与智能预约
2026-03-23
0 浏览
特斯拉Optimus Gen3即将发布:全新设计非简单升级
2026-03-23
0 浏览
北京启用全球首个机器人养老驿站 40余款智能设备投入服务
2026-03-23
0 浏览
AI打车数据首度公开 用户规模超预期
2026-03-23
0 浏览
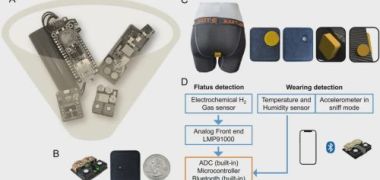
智能内裤监测放屁 科学家建人类放屁图谱
2026-03-23
0 浏览
工信部推进新能源汽车废旧电池回收体系建设
2026-03-23
0 浏览
地平线智驾芯片出货超400万套 中高阶方案占比近五成
2026-03-23
0 浏览
硅谷物理AI公司估值25亿 获杨致远诺奖得主投资 意向订单破万
2026-03-23
0 浏览


