

TAG:多连杆飞行器

东京大学飞行器实现92.5%成功率完成复杂空间穿越
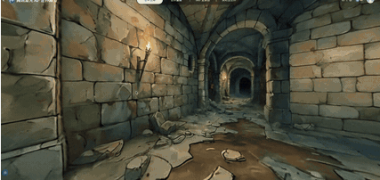
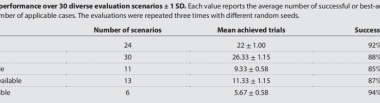
东京大学研究团队开发了一种分层轨迹规划框架,使多连杆飞行机器人能够以92.5%的成功率自主穿越复杂狭小空间。该技术解决了可变形态机器人在高维空间中的路径规划难题,通过结合全局引导和局部优化,确保飞行过程既安全又可控,为灾难搜救和工业巡检等应用提供了新可能。



觅蜂科技发布一站式物理AI数据服务平台,启动蜂巢数据共创行动
2026-04-17
0 浏览
它石智航完成Pre-A轮融资4.55亿美金破中国具身智能纪录,高瓴红杉美团联合领投
2026-04-17
0 浏览
AI总龙头业绩大增 A股也出现“七姐妹”
2026-04-17
0 浏览
AI需求强劲支撑涨势 美股三大期指小幅走高
2026-04-17
0 浏览
恒指加速反弹冲破26000点 AI主线赚钱效应凸显
2026-04-17
0 浏览
AI重塑产业供应链,云汉芯城上市首年推出分红转增 一季度净利润同比增长152%
2026-04-17
0 浏览
英国央行启动AI风险情景测试 警惕算法羊群效应冲击金融体系
2026-04-17
0 浏览
新手入门靠谱选择 亦逍遥DDR5内存开箱评测
2026-04-16
0 浏览
文化中国行 AI时代超级IP的成都算法
2026-04-16
0 浏览
蚂蚁灵波开源LingBot-Map,突破实时空间感知技术瓶颈
2026-04-16
0 浏览


