

TAG:图神经网络

Science Robotics 封面论文:RoboBallet利用图神经网络和强化学习规划多机器人协作
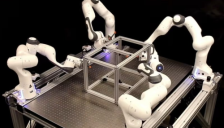
DeepMind与伦敦大学合作开发的RoboBallet系统,利用图神经网络和强化学习技术,实现了在多机器人随机环境中的高效任务与运动规划。该系统能够处理任意障碍物几何形状、任务姿势和机器人位置,无需依赖手工设计的简化方案,解决了任务分配、调度和运动规划的联合优化问题。
伦敦大学多机器人运动规划新方法登《Science Robotics》
伦敦大学学院与Google DeepMind等机构合作在《Science Robotics》发表创新研究,提出基于图神经网络和强化学习的多机器人运动规划方法。该方法通过GNN模型在数百万合成场景中训练,将机器人、任务和障碍映射为图结构,实现自动生成无碰撞轨迹,可泛化至新环境布局,仅需CAD文件和高级任务描述即可生成运动计划,大幅减少人工编程和调试需求。




美术宝神笔马良AI智绘教室亮相第87届教装展:打破虚拟边界,开启AI美育新纪元
2026-04-30
0 浏览
达卯科技携手湖南红太阳新能源,以“硬件+AI”打造能源数字化全球落地新范式
2026-04-30
0 浏览
当“AI”成为新消费引擎,中国移动咪咕亮出“智能经济”硬核实力
2026-04-30
0 浏览
SAS推出企业级AI治理工具,全面管控智能体以化解影子AI风险
2026-04-30
0 浏览
谷歌相册上线 AI 衣橱管家,支持一键提取单品和虚拟试穿
2026-04-30
0 浏览
特斯拉 Semi 电动卡车首辆量产车下线,历时九年研发
2026-04-30
0 浏览
三星电子单季净利暴增487%,李氏家族财富翻倍至3112亿元居亚洲第三
2026-04-30
0 浏览
三星 Galaxy Glasses 智能眼镜曝光:搭载骁龙 AR1 芯片、配备 1200 万像素相机,重约 50 克
2026-04-30
0 浏览
零犀科技凭借因果大模型打破AI商业化瓶颈并实现规模化盈利
2026-04-30
0 浏览
消息称苹果 iOS 27 相机将新增 Siri 模式,可通过 AI 记录食品标签、名片和活动门票
2026-04-30
0 浏览


