

TAG:仿生机器人
2026年仿生机器人竞争进展与行业趋势观察
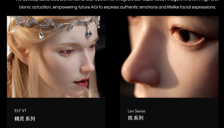
本文深度盘点了2026年仿生机器人行业的最新进展,重点聚焦“仿生面部+情感交互”赛道。文章详细解析了首形科技、松延动力、卓益得等领军企业在拟真表情、情绪基座、轻量化设计等方面的技术突破,揭示了人形机器人从工业生产向情感陪伴服务转型的趋势,并探讨了其在跨越“恐怖谷”效应后的商业化量产前景。

迪士尼老将联手Midjourney 打造会呼吸的机器人
前迪士尼工程师朱圣杰与Midjourney联合创始人John Jiang创立的Animotion Robotics,推出其首款DIY仿生机器人Éloi。这款机器人采用模块化设计,用户可高度定制,并通过核心记忆芯片储存用户交互痕迹,赋予其独特“灵魂”。Éloi具备创新的“呼吸感”,包括非指令性震颤、超低交互延迟及本能反应系统,展现独立人格,旨在挑战具身智能极限并重塑人机情感共生。Animotion致力于通过高认知、半卡通的仿生路径,为用户提供有温度、非工具化的陪伴。
央视新闻联播聚焦中关村论坛 月泉仿生应手与博文机器人引关注
月泉仿生在2026中关村论坛上凭借应手Y-Hand M2灵巧手与博文W-Bot 2.0轮式人形机器人惊艳亮相,获央视新闻联播等权威媒体聚焦报道。依托任雷教授首创的仿生拉压体理论,两大产品实现38自由度、96%类人操控成功率等突破,推动仿生技术从实验室走向智能制造、医疗健康、仓储物流等实际应用场景,展现中国原创科技的硬核实力与产业化潜力。
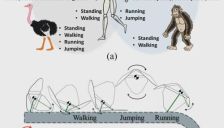
北理工团队研发磁驱微机器人 实现形态功能共融决策
北京理工大学王化平团队受生物支点行走启发,提出磁驱微机器人“形态-功能”共融的自主决策新机制,实现复杂环境中多模态运动切换与精准抓取。该研究发表于《IEEE Transactions on Robotics》,通过分层控制架构和非均质磁化设计,使微机器人在变径隧道、沟壑跨越及多形状目标运输中表现出高适应性与路径精度,推动微机器人向智能化、自主化迈进。
AI Show 2026火力全开 月泉仿生Y-Hand M2获创新奖
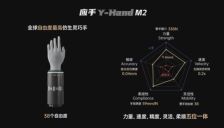
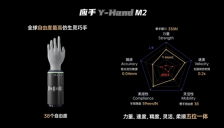
在AI Show 2026上,月泉仿生重磅发布新一代仿生灵巧手应手Y-Hand M2,凭借38自由度、330N握力、0.04mm精度等突破性性能,斩获示范应用创新奖。该产品基于原创仿生拉压体理论,实现力量、速度、精度与柔顺性的全面超越,推动具身智能向产业化落地迈进。

AI Show 2026月泉仿生发布Y-Hand M2 获创新应用奖
在AI Show 2026上,月泉仿生重磅发布新一代仿生灵巧手应手Y-Hand M2,凭借38自由度、330N握力、0.04mm精度等突破性性能,斩获示范应用创新奖。该产品基于原创仿生拉压体理论,实现力量、速度、精度与柔顺性的全面超越,推动具身智能向产业化落地迈进。

三花智控去年净利增三成 新能源车热管理产品产销量首降
三花智控2024年营收与净利润同比分别增长10.97%和31.10%,连续十年实现业绩增长,但新能源汽车热管理产品产销量首次下滑,国内汽车零部件也微降。公司毛利率提升,但面临汇兑损失与资产减值压力。仿生机器人机电执行器业务进展缓慢,2026年计划加大研发与海外布局。

未来科学城企业月泉仿生发布Y-Hand M2 获行业大奖
月泉仿生在未来科学城集团支持下,于AIShow2026展会上全球首发新一代仿生拉压体灵巧手Y-Hand M2,凭借原创技术突破荣获行业大奖。文章详细介绍了该产品的创新性能、行业应用前景,以及未来科学城如何通过资本、空间和生态支持,助力仿生智能技术产业化落地,推动昌平机器人产业集群发展。

国防科大研发1.2克纸折机器人 奔跑距离达17倍身长登顶刊
国防科技大学团队研发的1.2克折纸机器人PLioBot登上《Nature》子刊,这款微型机器人采用一体化集成制造技术,能在复杂地形中高速移动,每秒可跑17.8倍身长,还能负重游泳和钻过狭窄空间,展现了微型机器人技术的重大突破。

月泉仿生全球首发38自由度灵巧手Y-Hand M2 突破技术瓶颈
月泉仿生全球首发38自由度仿生灵巧手Y-Hand M2,突破机器人操作领域的'不可能三角',实现力量、速度、精度、灵活性和柔顺性的五位一体协同提升。该产品采用仿生拉压体技术,整手握力达330N,反应速度接近人手,为工业应用场景提供革命性解决方案。

小米三代人形机器人著作权已登记
小米近日展示了人形机器人在汽车工厂自主作业的能力,可连续工作3小时。企查查信息显示,其第三代机器人CyberOne的美术作品著作权已于去年登记,公司还拥有多项仿生机器人相关软件平台著作权。
2026春晚机器人产业迎来重要转折
本文以2026年春晚机器人表演为切入点,深度剖析了中国机器人产业从技术展示到商业落地的关键转折。文章重点分析了松延动力仿生机器人在春晚小品中的表现,探讨了技术路径从运动控制向情感交互的迁移,以及行业面临的规模化交付挑战和市场教育机遇,揭示了机器人产业正步入以量产能力和场景应用为核心的'成人礼'阶段。

春晚机器人蔡明走红 松延动力赠真蔡明
今年央视春晚上,松延动力研发的仿生机器人以1:1比例完美复刻蔡明的容貌与神态,与真人同台演出,令观众叹为观止。该机器人经过精准3D扫描和多项技术突破,能灵活展现面部表情,最终被赠予蔡明本人,展现了科技在表演艺术中的创新应用。

浙大团队研发仿生飞行机器人 可抓握栖息灵活运载
浙江大学团队研发出仿生飞行机器人HI-ARM,将人手的灵巧抓取与无人机的敏捷飞行深度融合,实现了空中自主抓取、开门、栖息和运输等功能。这款仅手掌大小的机器人具备5自由度变形能力,能在复杂环境中完成多种任务,展示了空中操作机器人的巨大潜力。
全球首款完全仿生机器人使用高测股份复合金属腱绳
上海卓益得机器人有限公司发布全球首款完全仿生机器人,其全身肌腱采用高测股份复合金属腱绳,实现了对人类生理机能的全方位精准逼近。测试数据显示,机器人行走里程超1200公里,折弯次数突破100万次,腱绳全程无断裂,验证了产品的高耐用性与稳定性。







